Boisbriand, Quebec, March 20, 2026
Kinova, a global leader in robotic manipulation technologies with 20 years of proven expertise, is proud to announce its participation in a national consortium led by Ottawa based Mission Control, recently selected by the Canadian Space Agency (CSA) to help design a Canadian lunar utility rover concept.
Mission Control was one of three companies awarded a contract worth $4.7 million by the Canadian Space Agency to execute the initial phase in the development of the Canadian Lunar Rover. This will include an initial study of the tasks the utility rover will be designed to perform and the development of critical technologies in advance of building an entire prototype. This contract serves as the launch point for Canada’s $1.35 billion investment in the LUV program.
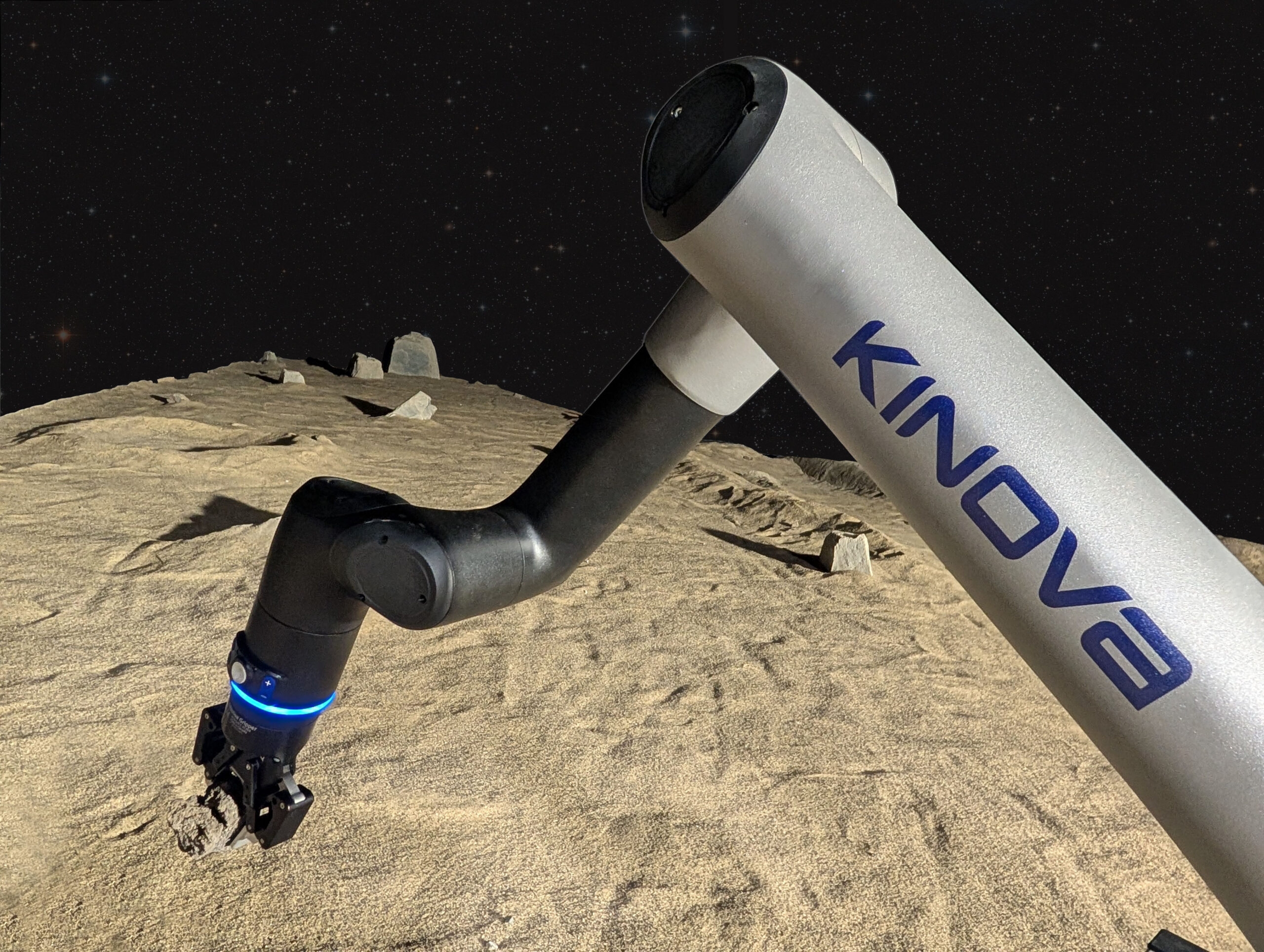
Working alongside its Canadian team partners, Kinova will lead the development of the robotic manipulator system for the rover; defining requirements, developing robotic arm concepts, and conducting validation work for a manipulator adapted specifically to lunar operations. This builds directly on Kinova’s highly mature, field proven robotic arms currently deployed in demanding terrestrial environments—from nuclear and energy sectors to medical robotics and mobile manipulation.
“Our robotic arms are already fully mature and trusted in some of the most challenging environments on Earth. Bringing this expertise into the lunar and broader space domain is a natural evolution for Kinova,” said Jonathan Lussier, Technical Director. “We are excited to apply two decades of innovation in reliable, high performance manipulation to help shape the next generation of Canadian space robotics.”
The utility rover will be designed to perform tasks with minimal human intervention during its anticipated 10year mission on the lunar surface. Kinova’s contribution will help enable the vehicle to carry out tasks such as sample handling, material interaction, and autonomous or semi-autonomous manipulation in harsh lunar conditions.
“Designing a rover to operate for years on the lunar surface pushes the boundaries of autonomy and reliability — and we’re proud to take on that challenge for Canada alongside our partners.” said Dr. Michele Faragalli, Chief Technology Officer at Mission Control. He went on to say that “adding Kinova and their decades of experience in terrestrial robotics markets demonstrates how established world class Canadian technology can be applied to the challenges of space exploration and brings our team one step closer to realizing a fully made in-Canada rover.”
This collaboration represents an important milestone in Kinova’s expansion into space and planetary robotics, reinforcing the company’s commitment to enabling critical exploration technologies for future lunar missions.
Read original release here