In the fall of 2024, Mission Control travelled to Flagstaff Arizona with their Husky rover to take part in phase two of the NASA PSTAR (Planetary Science and Technology from Analog Research program) funded Augmented Reality Data Visualization Analog Research Campaign (ADRVARC). By using the same lunar analogue field site, ARDVARC will simulate deploying a rover to collect data from the same location that an astronaut will later visit. The simulated mission will assess the benefits of having this collected data available to the astronaut in augmented reality.
During phase one, in August 2023, the ARDVARC team selected a site in the San Francisco Volcanic Field around Flagstaff Arizona. This site was chosen on five criteria: local topography, logistical accessibility, vegetation cover, cellular signal, and local geologic diversity.
Using Johnson Space Center (JSC)’s “artificial sun” after the sun had set, the field site was used to simulate low-angle solar illumination, as well as basic illumination of the craters and features under these conditions, including the conditions that will be experienced by the Artemis crew at the lunar south pole. During this time, an uncrewed aerial vehicle was deployed overhead to collect images and video, documenting and assessing the field and lighting conditions

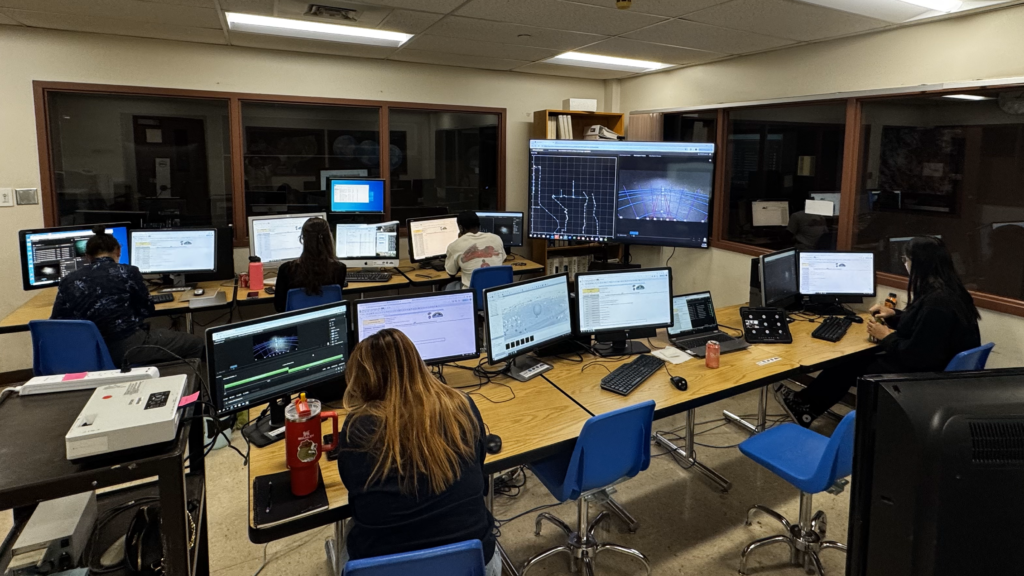
For this second phase of ARDVARC, the Mission Control team brought their Husky rover to the field site for the ten night-long analogue mission and provided operational field support. The Husky, equipped with optical sensors with targeting capability, was teleoperated using Mission Control’s Spacefarer™ operations software. For ten nights after the sun had set, the Husky was remotely teleoperated by a team at the University of Texas at El Paso (UTEP) with Spacefarer™ under a command & response mode analogous to operating rovers on the Moon.

“The ARDVARC mission was an excellent opportunity to get UTEP students involved in lunar analog work that will have a real impact on future missions. The Spacefarer™ software interface to the rover gave us a platform for executing a successful mission as well as for investigating and experimenting with ways of doing real-time, remote operations. The challenges we encountered in doing so were real learning opportunities for figuring out issues like navigation, localization, hazard avoidance, and tracking science progress. The UTEP students already have ideas for how they would do another mission, and they can’t wait for the opportunity to do this again!”
– Dr. Jose Miguel Hurtado, University of Texas at El Paso Professor
The main goal of this phase was to operate the rover using onboard cameras and to map as much of the field site as possible with an attached Leica BLK 360 LiDAR system.
“Supporting ARDVARC was a fantastic opportunity to showcase Spacefarer™ as an operations platform not just for flight missions, but also for terrestrial analogue operations. So much is learned from conducting these analogue missions, from understanding how you want to interact with your remote robotic system to how you make operational decisions. Learning those lessons at an early stage in a program can help improve operational efficiency and science return during mission operations.” – Dr. Matt Cross, Planetary Robotics Research and Strategy Lead- Mission Control
The LiDAR and image data collected by the rover will be used to create the basis of a terrain morphology based Augmented Reality (AR) system in the final phase of the mission in 2025, where team members will act as astronauts, using an AR head mounted display to assess the data collected and assist with human navigation of the analogue polar environment. The data will include an overlay of the rover traverse path, an overlay of the elevation data and an overlay of the astronaut traverse path to assist with wayfinding during the analogue mission.
“The success of this analogue mission was thanks in large part to the Spacefarer™ software and rover hardware provided by Mission Control. One of the major goals of the project was to give students an immersive, hands-on mission control room experience, and the Mission Control setup allowed us to do exactly that.” – Dr. Zach Morse, Principal Investigator for ARDVARC — Howard University / NASA Goddard Space Flight Center.
The research outcomes from ARDVARC support several objectives of the Analog Objectives for Artemis Strategic Actions Team report. Access to data collected from robotic pre-cursor missions will help ensure safe and efficient exploration for crewed post-cursor missions. Mission Control is proud to have supported this exciting research.